Lecturer in Mechanical Engineering
Department of Mechanical, Biomedical & Design Engineering
School of Engineering and Technology
College of Engineering and Physical Sciences
Aston University, Birmingham, United Kingdom
Compliant Mechanisms • Precision Robotics • Flexure Design
About
Dr. Jiaxiang Zhu is a Lecturer in Mechanical Engineering at Aston University, UK. His research specializes in the design, nonlinear analysis, and experimental validation of compliant mechanisms that enable precise motion for high-precision applications such as nano-positioning systems, surgical tools, and precision robotics.
He obtained his Ph.D. from the University College Cork under the supervision of Prof. Guangbo Hao, focusing on modeling, fabrication, and optimization of flexure-based mechanisms. His academic vision emphasizes bridging analytical modeling with real-world engineering design.
His research interests include nonlinear compliant structures, high-precision actuation, robotic manipulation, and compliant design for biomedical and nano-engineering systems.

FlexureX Lab
Ultra-precise motion via flexible structures
The FlexureX Lab at Aston University explores the design and applications of
compliant mechanisms and flexure-based systems for ultra-precision motion control.
By leveraging material flexibility, the lab develops compact, high-accuracy devices for
robotics, metrology, and biomedical engineering.
Our research combines mechanical design theory, nonlinear analysis, and experimental validation
to advance flexure technology for next-generation mechatronic systems.
Representative compliant mechanism designs and experimental prototypes developed during
my PhD research under the supervision of
Prof. Guangbo Hao,
in collaboration with
CoMAR.
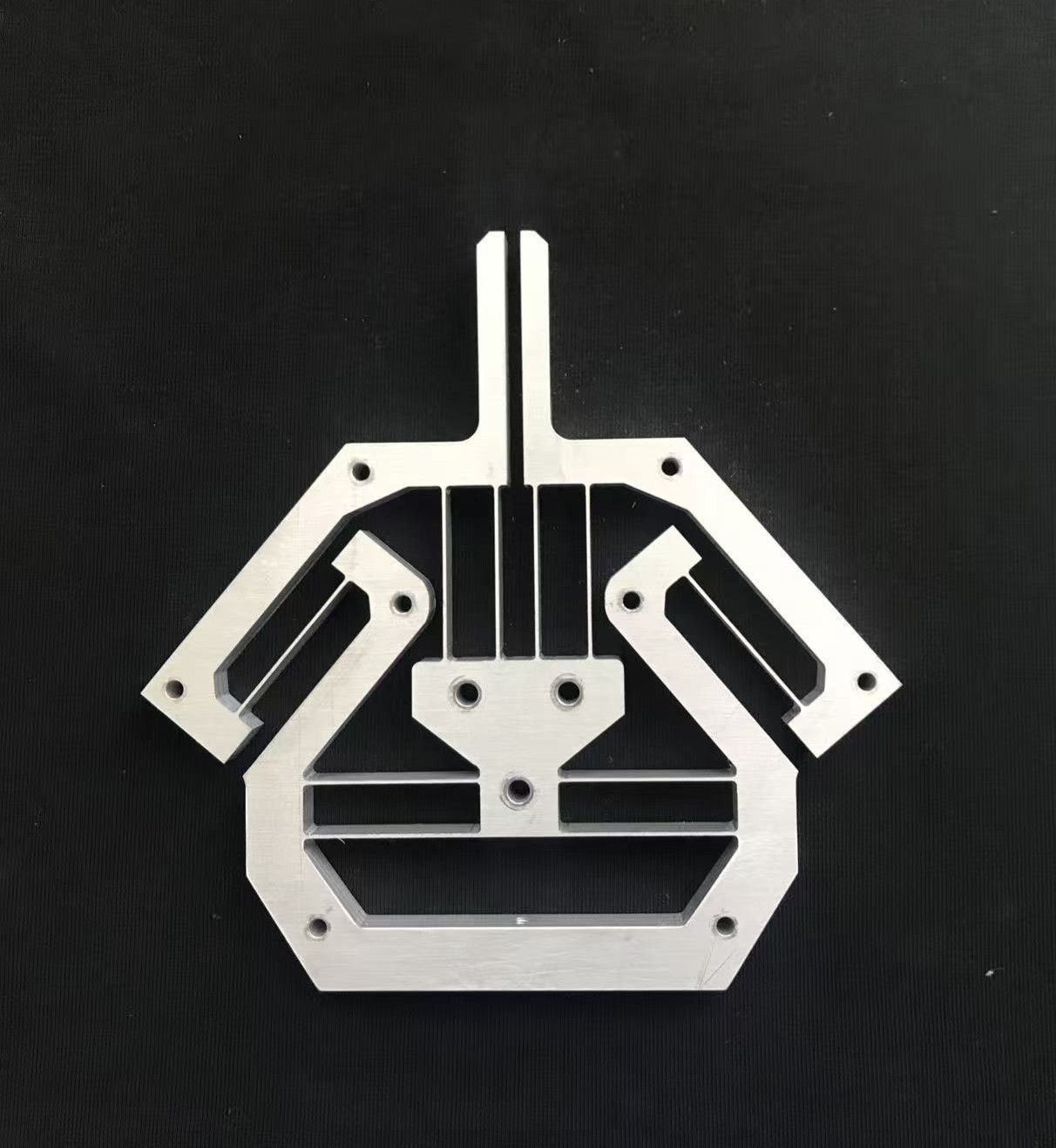
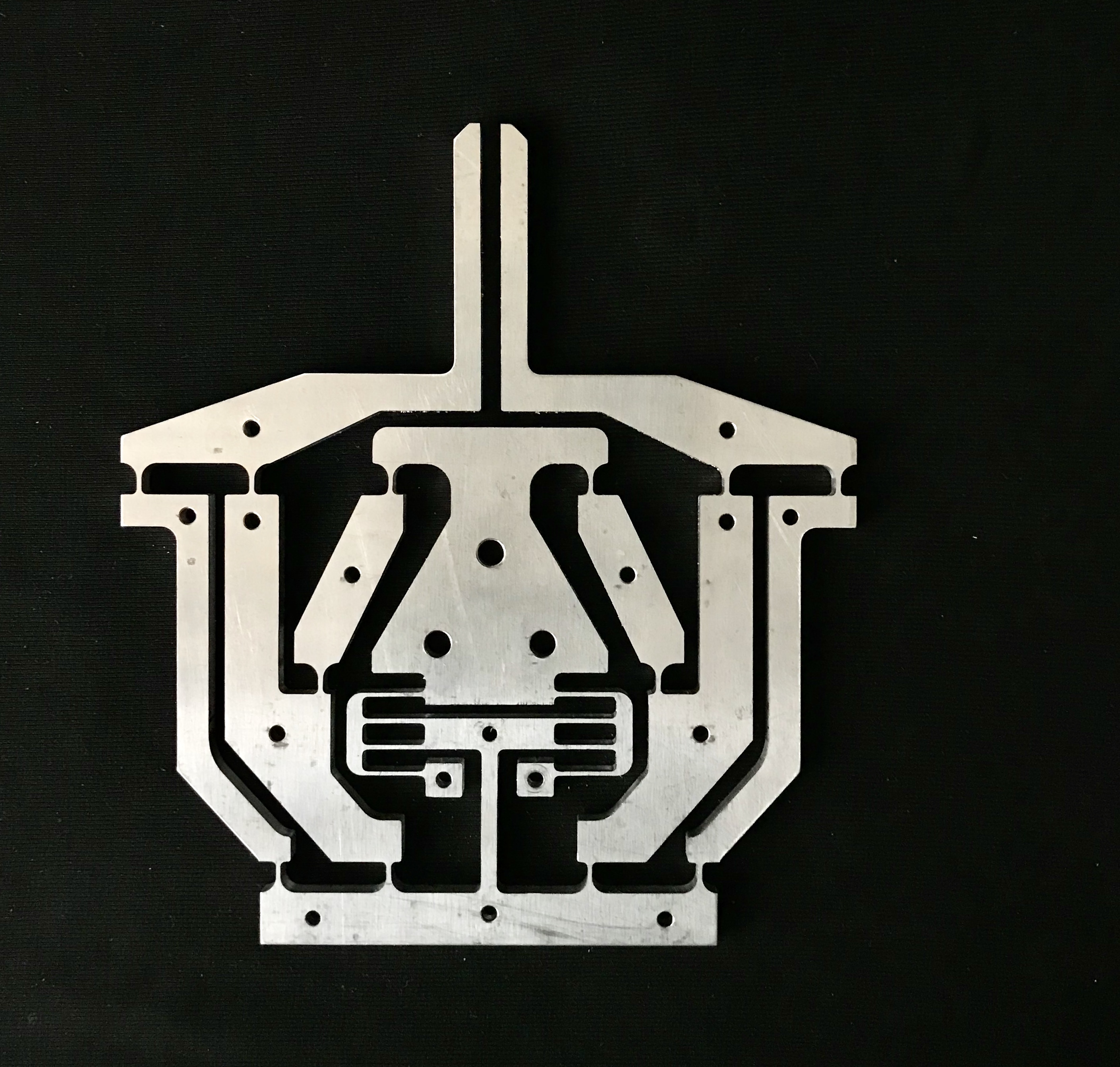
Compliant Gripper
Compliant gripper with parallel gripping (2020)
XY Compliant Parallel Manipulator
Compact mirror-symmetrical XY compliant stage minimizing parasitic motion (2022)
Bistable Mechanisms
Nonlinear bistable compliant structures with controlled energy profiles (2023)
Compliant Amplifier with Constant Amplification Ratio
Over-constraint-based compliant amplifier maintaining nearly constant amplification (2023)
Spherical Joint
Single-translation constraint-based compliant spherical joint (2024)
Designs and animations were generated during my PhD research under the supervision of Prof. Guangbo Hao.
Awards & Honors
ASME Compliant Mechanisms Award
American Society of Mechanical Engineers
2022

Publication of the Year Award
School of Engineering & Architecture, UCC
2023

Best Research Image
School of Engineering & Architecture, UCC
2021

Student Mechanism & Robot Design Competition
ASME IDETC Conference – 2nd Place
2021 / 2022
All awards and honors received by Dr. Jiaxiang Zhu, 2014–2024.
Publications
Journal Papers
- Zhu, J., Li, S., & Hao, G. (2025). Nonlinear design of a general single-translation constraint and the resulting general spherical joint. Journal of Mechanical Design. DOI
- Zhu, J., & Hao, G. (2024). Modelling of a general lumped-compliance beam for compliant mechanisms. International Journal of Mechanical Sciences, 263, 108779. DOI
- Zhu, J., Hao, G., Liu, T., & Li, H. (2023). Design of an over-constraint-based nearly-constant amplification ratio compliant mechanism. Mechanism and Machine Theory, 186, 105347. DOI
- Zhu, J., Hao, G., Li, S., & Kong, X. (2022). A compact mirror-symmetrical XY compliant parallel manipulator for minimizing parasitic rotations. Journal of Mechanical Design, 144(7), 073303. DOI
- Zhu, J., & Hao, G. (2020). Design and test of a compact compliant gripper using the Scott–Russell mechanism. Archives of Civil and Mechanical Engineering, 20, 1–12.
- Hao, G., & Zhu, J. (2019). Design of a monolithic double-slider based compliant gripper with large displacement and anti-buckling ability. Micromachines, 10(10), 665.
- Liu, T., Hao, G., Zhu, J., Kuresangsai, P., Abdelaziz, S., & Wehrle, E. (2024). Modeling compliant bistable mechanisms: An energy method based on the high-order smooth curvature model. International Journal of Mechanical Sciences, 275, 109315.
- Li, S., Hao, G., Chen, Y., Zhu, J., & Berselli, G. (2022). Nonlinear analysis of a class of inversion-based compliant cross-spring pivots. Journal of Mechanisms and Robotics, 14(3), 031007.
- Li, K., He, X., Lv, L., Zhu, J., Hao, G., Li, H., & Song, X. (2023). A single-fidelity surrogate modeling method based on nonlinearity integrated multi-fidelity surrogate. Journal of Mechanical Design, 145(9).
- Hao, G., He, X., Zhu, J., & Li, H. (2024). Design and Analysis of Leaf Beam Single-Translation Constraint Compliant Modules and the Resulting Spherical Joints. Journal of Mechanical Design, 146(8), 083301.
- Mokhtari, M., Varedi-Koulaei, S. M., Zhu, J., & Hao, G. (2022). Topology optimization of compliant mechanisms considering curved beam elements using metaheuristic algorithms. Proc. Inst. Mech. Eng. Part C: J. Mech. Eng. Sci., 236(13), 7197–7208.
Conference Papers
- Zhu, J., Hao, G., Ye, S. (2024, June). Nonlinear modelling of a novel single-translation constraint and centre drift analysis of the resulting spherical joint. In MMT Symposium 2024, Universidade do Minho.
- Song, X., Li, K., Wang, S., Kan, Z., Li, H., Zhu, J., & Hao, G. (2022). Framework design of a digital twin of an XY compliant parallel manipulator based on non-negative matrix factorization. In ASME IDETC/CIE, V002T02A023.
- Zhu, J., Hao, G., Liu, T., & Li, H. (2022). Design and nonlinear analysis of an over-constraint-based constant amplification ratio compliant mechanism. In ASME IDETC/CIE, V007T07A005.
- Zhu, J., Hao, G., & Tang, H. (2022). Design and modelling of a generic compliant mechanism with bi-stability and static balancing. In IEEE 3M-NANO 2022, 172–177.
- Zhu, J., Hao, G., Li, S., Yu, S., & Kong, X. (2021). A mirror-symmetrical XY compliant parallel manipulator with improved performances without increasing the footprint. In ASME IDETC/CIE, V08AT08A012.
- Li, S., Hao, G., Chen, Y., Zhu, J., & Berselli, G. (2021). Nonlinear analysis of a class of inversion-based compliant cross-spring pivots. In ASME IDETC/CIE, V08AT08A011.
Last updated: October 2025